SpyCat
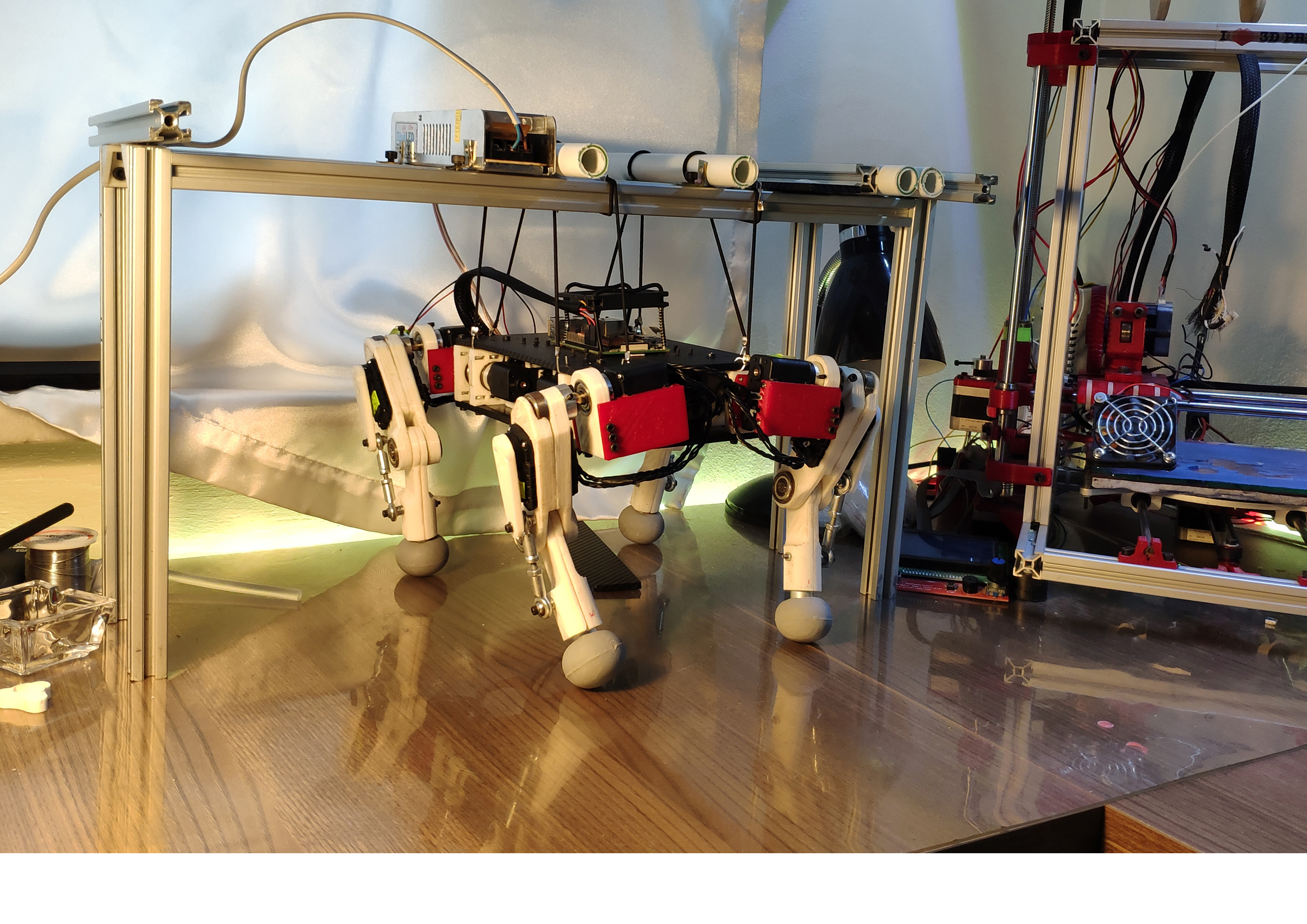
A 12-DOF Quadruped RobotTUBITAK 2209/B
- Conseptual System Design
- Mechatronical System Desing and Development
- Robotic Developments and Tests
Quadruped robots are mostly used for hazardous environments that contain obstacles and can be dangerous for humans. Necessity of legged robots are increasing day by day because of their ability of move more flexibly and efficiently on rough terrain than other classical type robots. We present a design of a quadrupedal robot in a small size like a cat. Robot systems include a smart method for leg control, determine the body orientation and global location. This project open doors to enable the quadruped robot to walk over uneven terrain while keeping its balance as well as executing autonomous missions.
Cat like quadruped robot project aimed to be developed in order to lay the groundwork for future studies in addition to a quadruped robot design. In this way, project offers a low-cost, easy to build, lightweight and open to development robot to people who want to contribute from different disciplines in the field of rapidly developing legged robotics without needing to worry about the mechatronics. Thus, we aimed to contribute to the innovations in the field of legged robotics by opening a way to develop this platform.