FrontAct (Formerly Meltin MMI)
Project 1 Name:
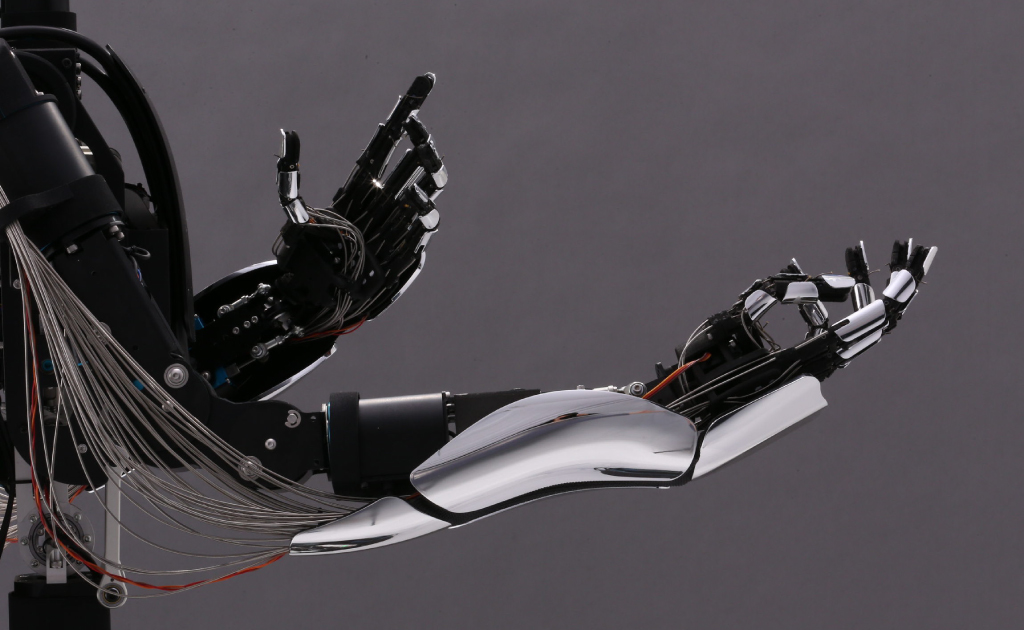
Developing Cyborg Technology
Project overview
- Developed software for a multi-DOF, wire-driven robotic hand enabling dexterous teleoperation.
- Delivered control stack across IK, motion planning, and real-time closed-loop control.
- Built a high-fidelity digital twin for algorithm testing, validation, and rapid prototyping.
Role:
- Robotics Software Engineer @ Avatar Division
Project Objectives:
- Developed the inverse kinematics solver algorithm for 5 fingers including all joints of the robotic hand. Create a simulation environment that simulates the object-hand interaction Developed a special algorithm for controlling the force at the robot hand’s fingertip. Developed remote control device software Developed control strategies for the smart wire-driven actuator that controls the joints of the robot hand.
- Developed a high-performance inverse kinematics solver and closed-loop motion/force controllers for a multi-DOF, wire-driven robotic hand, enabling precise manipulation tasks.
- Created a high-fidelity digital twin of the robotic hand in a dynamic simulation environment for algorithm testing, validation, and rapid prototyping.
Project 2 Name:
MELTz and other devices
Project overview
- Developing various softwares for Medical Devices
Role:
- Robotics Software Engineer @Medical Division
Project Objectives:
- Developed software modules, and algorithms for various functionalities for multiple medical devices. Engineered solutions for hardware performance issues, such as system endurance and temperature management.
- Led the end-to-end development of new features for the companion mobile application (Flutter), from UI/UX design to final implementation.
- Engineered mission-critical software for a medical device, including an AI-powered signal prediction algorithm and real-time microcontroller communication protocols.